Euresys Easy3D Match
Highlights
The Easy3DMatch library features alignment functions to find the exact pose (position and orientation) of acquired 3D objects using a reference model. This model can be specified as a reference point cloud or as a 3D mesh from CAD software. Easy3D is required when using any Open eVision’s 3D library and is provided when purchasing Easy3DLaserLine, Easy3DObject, Easy3DMatch or the 3D Bundle.Compatibility with 3D sensors.
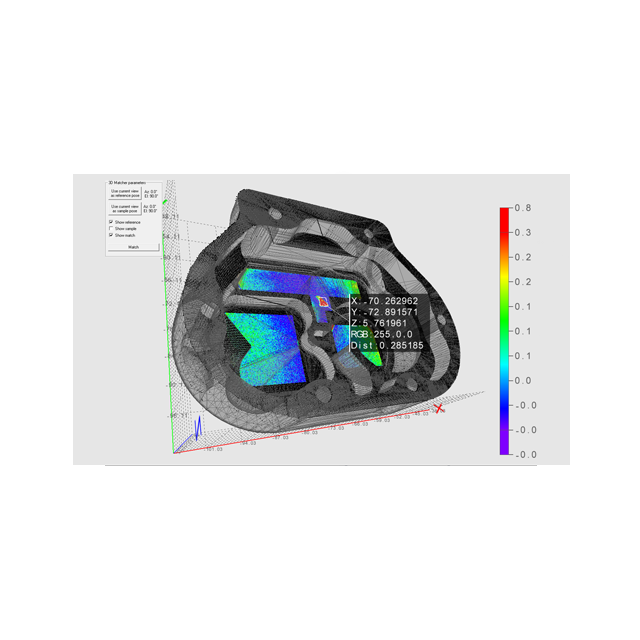
After the alignment of the 3D data with the reference model, Easy3DMatch can search for local discrepancies, like holes, bumps, scratches, gaps… The list of detected anomalies is returned along with their individual position, distance and area. New point clouds with distances and colored data can be generated and displayed by the interactive Open eVision 3D viewer.
Easy3DMatch can use 3D data coming from a variety of 3D acquisition techniques like laser triangulation, structured light, stereo vision or time of flight. Open eVision’s compatibility has been tested with several 3D sensor brands: Automation Technology, Azure Kinect, Benano, IDS Ensenso, Intel Realsense, Lucid Helios, LMI Gocator, Mech-Mind, Photoneo PhoXi, Shenzhen SinceVision (SSZN), Zivid and others. Point Clouds and ZMaps are managed efficiently and allow 3D processing and analysis to be performed.
Features
- Align a scanned 3D object with another scan or with a reference mesh
- Compute the local distances between 3D scans and a golden sample or reference mesh
- Detect anomalies such as misplaced features, geometric distortions, gaps, bumps, etc.
- Compatible with all 3D sensors that produce point clouds, depth maps or height maps